2023. 5. 12. 20:06ㆍ프로젝트 로그/RaspberryPi-Pico
Picoprobe 만들기
별도의 JTAG 및 디버거 없이 여분의 RaspberryPi-Pico보드가 있으면, 해당 보드를 디버거로 구축 해서 사용 할 수 있다.
아래 그림의 왼쪽 보드는 디버거, 오른쪽 보드는 타겟 보드가 된다.

아래 그림과 같이 GP2->SWCLK, GP3->SWDIO로 연결하면 SWD로 타켓 보드를 디버깅 할 수 있다.
또한 타겟보드의 UART0를 Picoprobe의 UART1과 연결하면, 타겟보드에서 출력하는 UART 메시지를 디버거 보드의 USB로 확인 할 수 있다.



Picoprobe UF2 Download
앞에서 설명한 Picoprobe를 만들기 위해서는 별도의 펌웨어가 필요하다.
직접 컴파일해서 사용 해도 되지만, 미리 만들어진 바이너리를 업로드해서 사용하기로 한다.
다운로드 링크
- https://www.raspberrypi.com/documentation/microcontrollers/raspberry-pi-pico.html
- "Debugging using another Raspberry Pi Pico" 에서 다운로드

윈도우즈 환경 설정
Windows에서 Picoprobe를 인식하기 위한 드라이버 설치
드라이버 다운로드 링크
- Zadig 툴을 이용하여 Picoprobe 드라이버를 설치
- https://zadig.akeo.ie/#google_vignette
드라이버가 정상 설치 되면, 장치 관리자에서 아래와 같은 화면을 볼 수 있음

OpenOCD for Windows 설치
https://gnutoolchains.com/arm-eabi/openocd/
VSCODE 디버깅 설정 방법
VSCODE 실행
VS 코드는 Developer Command Prompt from V2022에서 실행 해야 한다.


Extension 설치 및 설정
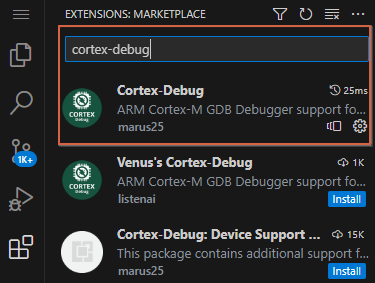
extension으로 c/c++, corted-debug를 설치 한다.

Configuration Provider를 cmake tools로 변경한다.


File -> Preferences -> Settings의 CMake Tools의 Configure Enviromnet에 PICO_SDK_PATH를 추가 한다.
작업할 프로젝트를 기준으로 상대 주소로 PICO SDK 위치를 입력 하면 된다.

CMake:Generator에 NMake Makefiles 설정
NMake로 설정하지 않은 경우, 기본으로 Ninja로 설정


참고자료
https://blog.naver.com/PostView.naver?blogId=chcbaram&logNo=222723962242
Picoprobe를 이용해서 RP2040 디버깅 하기
라즈베리파이 피코를 디버깅 장비를 이용해서 실시간 디버깅을 할때 라즈베리파이 피코를 디버거로 만들어...
blog.naver.com
'프로젝트 로그 > RaspberryPi-Pico' 카테고리의 다른 글
| [RaspberryPi-Pico] 개발 환경 구축(Windows) #1 (0) | 2023.02.07 |
|---|---|
| [RaspberryPi-Pico]라즈베리파이 피코란? (0) | 2023.02.06 |